

The MMA8451 is a low-power accelerometer with 14 bits of resolution, with the following features:
- Embedded functions with flexible user-programmable options, configurable to two interrupt pins
- Embedded interrupt functions for overall power savings relieving the host processor from continuously polling data
- Access to both low-pass filtered data as well as high-pass filtered data, which minimizes the data analysis required for jolt detection and faster transitions
- Inertial wake-up interrupt signals from any combination of the configurable embedded functions allowing the MMA8451Q to monitor events and remain in a low-power mode during periods of inactivity

Features
- 1.95 to 3.6-volt supply voltage
- 1.6 to 3.6-volt interface voltage
- ±2g/±4g/±8g dynamically selectable full-scale
- Output data rates (ODR) from 1.56 Hz to 800 Hz
- 99 μg/√Hz noise
- 14-bit and 8-bit digital output
- I²C digital output interface (operates to 2.25 MHz with 4.7 kΩ pull-up)
- Two programmable interrupt pins for seven interrupt sources
- Three embedded channels of motion detection
- Freefall or motion detection: one channel
- Pulse detection: one channel
- Jolt detection: one channel
- Orientation (portrait/landscape) detection with programmable hysteresis
- Automatic ODR change for auto-wake and return to sleep
- 32 sample FIFO
- High pass filter data available per sample and through the FIFO
- Self-test
Again due to the size and package of the module its easier to buy a module, here is one that I purchased. All you need to do is solder on the header and then connect using wires from your module to your Wemos Mini, wiring connections later
Connection
I used the following connection from the module above to my Wemos Mini
| micro:bit Connection | Module Connection |
| 3v3 | VCC_IN |
| Gnd | Gnd |
| P20 | SDA |
| P19 | SCL |
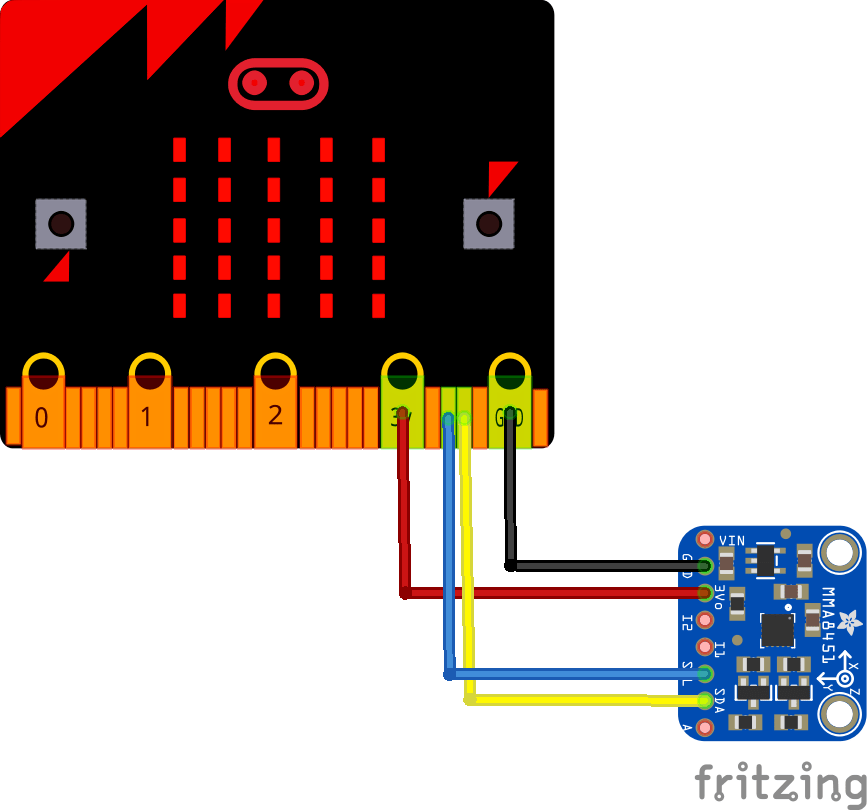
microbit and mma8451
Code
This requires the Adafruit library from https://github.com/adafruit/Adafruit_MMA8451_Library/archive/master.zip
I had to edit the Adafruit header file called Adafruit_MMA8451.h as my device was address 0x1c (28), I discovered this using an I2C scanner
#define MMA8451_DEFAULT_ADDRESS (0x1C)
[codesyntax lang=”cpp”]
#include <Wire.h>
#include "Adafruit_MMA8451.h"
#include <Adafruit_Sensor.h>
Adafruit_MMA8451 mma = Adafruit_MMA8451();
void setup(void) {
Serial.begin(9600);
Serial.println("Adafruit MMA8451 test!");
if (! mma.begin()) {
Serial.println("Couldnt start");
while (1);
}
Serial.println("MMA8451 found!");
mma.setRange(MMA8451_RANGE_2_G);
Serial.print("Range = "); Serial.print(2 << mma.getRange());
Serial.println("G");
}
void loop() {
// Read the 'raw' data in 14-bit counts
mma.read();
Serial.print("X:\t"); Serial.print(mma.x);
Serial.print("\tY:\t"); Serial.print(mma.y);
Serial.print("\tZ:\t"); Serial.print(mma.z);
Serial.println();
/* Get a new sensor event */
sensors_event_t event;
mma.getEvent(&event);
/* Display the results (acceleration is measured in m/s^2) */
Serial.print("X: \t"); Serial.print(event.acceleration.x); Serial.print("\t");
Serial.print("Y: \t"); Serial.print(event.acceleration.y); Serial.print("\t");
Serial.print("Z: \t"); Serial.print(event.acceleration.z); Serial.print("\t");
Serial.println("m/s^2 ");
/* Get the orientation of the sensor */
uint8_t o = mma.getOrientation();
switch (o) {
case MMA8451_PL_PUF:
Serial.println("Portrait Up Front");
break;
case MMA8451_PL_PUB:
Serial.println("Portrait Up Back");
break;
case MMA8451_PL_PDF:
Serial.println("Portrait Down Front");
break;
case MMA8451_PL_PDB:
Serial.println("Portrait Down Back");
break;
case MMA8451_PL_LRF:
Serial.println("Landscape Right Front");
break;
case MMA8451_PL_LRB:
Serial.println("Landscape Right Back");
break;
case MMA8451_PL_LLF:
Serial.println("Landscape Left Front");
break;
case MMA8451_PL_LLB:
Serial.println("Landscape Left Back");
break;
}
Serial.println();
delay(500);
}
[/codesyntax]
Output
Open the serial monitor
X: 4686 Y: 2748 Z: 684
X: 10.80 Y: 6.11 Z: 0.21 m/s^2
Landscape Right Front
X: 1314 Y: -3198 Z: 2014
X: 2.01 Y: -7.75 Z: 5.52 m/s^2
Portrait Up Front
X: 2194 Y: 2762 Z: -2530
X: 6.57 Y: 7.33 Z: -2.77 m/s^2
Portrait Down Back
X: 2294 Y: 3182 Z: -392
X: 3.49 Y: 2.23 Z: 0.13 m/s^2
Landscape Right Back
X: 224 Y: 1324 Z: -2844
X: -2.46 Y: 7.03 Z: -9.81 m/s^2
Portrait Down Back
Links
Here is a link to the module
GY-45 MMA8451 Module Digital Triaxial Accelerometer High-precision Inclination Module